רובוט ריתוך MIG איכותי בסין לריתוך נירוסטה







גוף הרובוט
הרובוט של JHY משתנה בעיקר בתהליך הליהוק ובעיצוב הפרטים של הגוף. צוות המחקר והפיתוח שלנו ביצע חידושים רבים בעיצוב גוף הרובוט, ובעל יותר מעשרה פטנטים חדשים על המצאות.
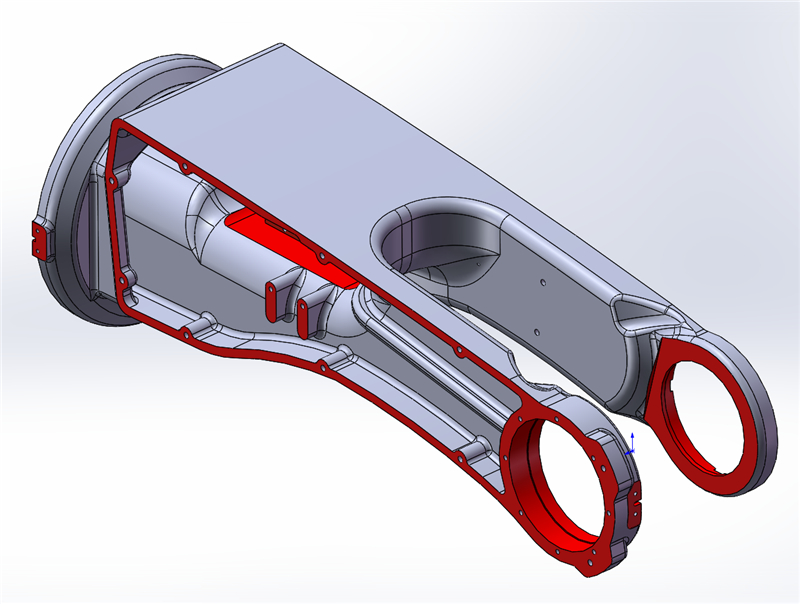
לדוגמה, בציר השישי פותחה מנגנון תמסורת מדויק במיוחד ותכננו מוטות חיזוק, בנוסף, דיסק הפלט של הגלגל השישי אימץ עיצוב ללא הילוכים, מה ששיפר מאוד את הדיוק והיציבות של הרובוט. גם אם לפיד הריתוך פועל במצב קשה, הוא עדיין יכול להבטיח יציבות וללא רעידות. נקודה זו אושרה על ידי לקוחותינו המקומיים.
גוף הרובוט מיוצר בטכנולוגיית יציקה, מה שהופך את הרובוטים שלנו לצפיפות גבוהה וקלים יותר. הזרוע הקדמית יכולה להיות צרה וארוכה יותר, היחס בין הזרוע העליונה לזרוע הקדמית קרוב יותר ליחס הזהב, כך שהתנועה גמישה ומהירה יותר.
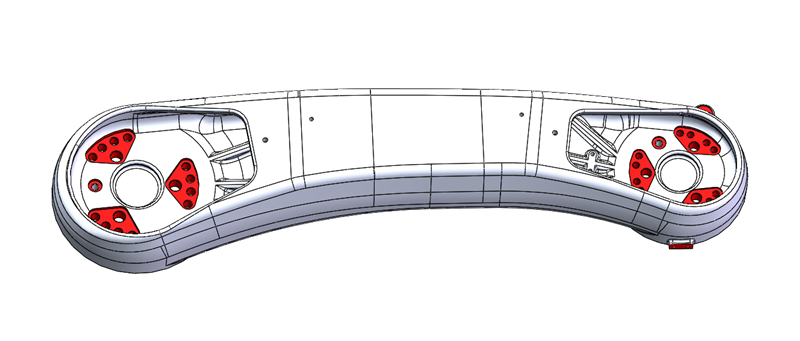
עיצוב קווי מתאר
עיצוב הזרוע הקדמית הישרה של הרובוט הוא פשוט ואלגנטי יותר. עם תחושה עיצובית, התואמת יותר את האסתטיקה של השוק האירופי. עיצוב גוף הרובוט הגיש בקשה למספר פטנטים טכניים, גוף הרובוט החדש מושלם יותר.
מותג חוטים מוביל
החוטים הפנימיים והמסופים של הרובוט מיוצרים על ידי המותגים היפניים המובילים: DYEDEN, TAIYO, כמו ABB ו-Fanuc.
טרמינל: מותג יירמה האיטלקי.
מותגים מובילים של מנועי סרוו / דרייבר / מפחית
כולם מאמצים את המותגים המובילים בסין. כל מותג נבדק ונחקר במשך זמן רב לפני קבלת ההחלטה הסופית, על מנת להבטיח שמותגים אלה מתאימים לשימוש הרובוטים שלנו ושהאיכות והביצועים שלהם יציבים ואמינים.
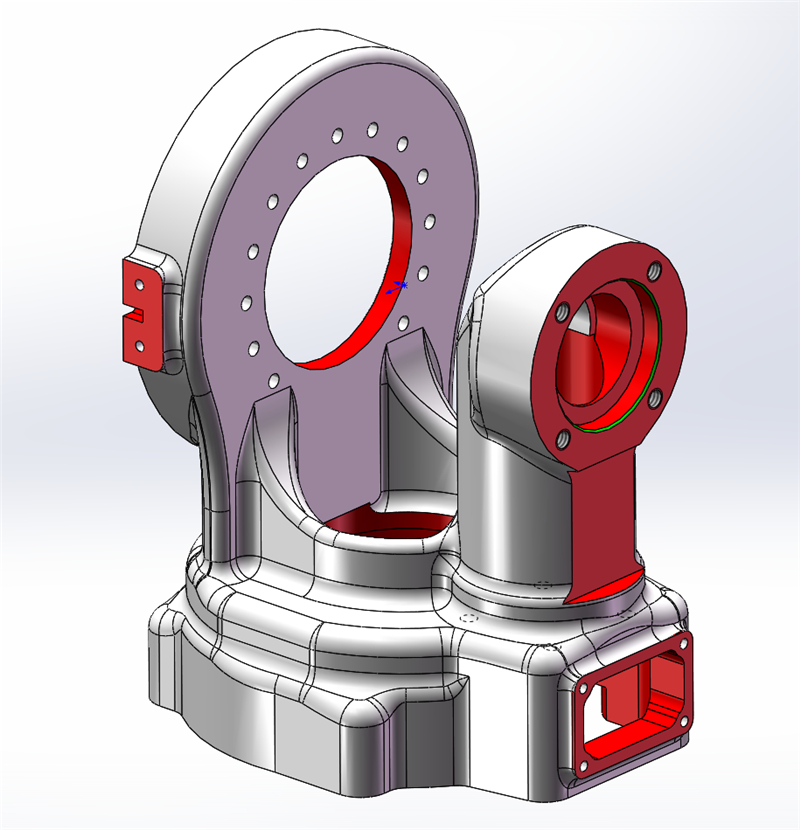
צירי J1 ו-J2 מאמצים עיצוב של שלושה צירים אקסצנטריים עם מומנט של עד 65 ניוטון מטר, מה שמפחית את הבלאי של גלגל השיניים ומגדיל את חיי השירות של המהדק. מהדקים רובוטיים מסוג JHY J1 ו-J3 הם כיום בעלי התצורה הגבוהה ביותר בסין.
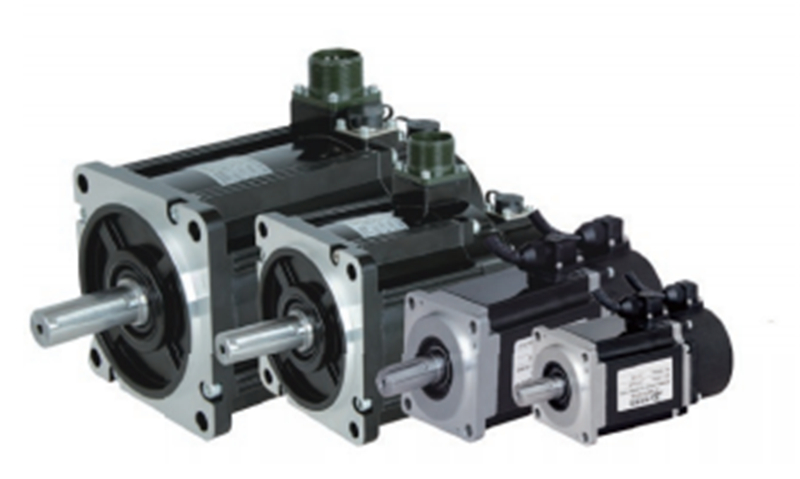
לגבי מנוע סרוו, כעת אנו משתמשים במנוע 3 קילוואט לכל היותר עבור רובוטים.
עבור רובוטים באורך 1.8 מטר ו-2 מטר, כוח ההנעה הנדרש עבור הצירים הראשון והשני גדול יותר, וגם הדרישות להספק המנוע גבוהות יותר.
המנועים בעלי הדיוק הגבוה והמגוון המפרטים יכולים לענות באופן מלא על דרישות היישומים של הרובוט שלנו.

3 שנים/7500 שעות ללא תחזוקה
התחזוקה פשוטה, הלקוחות עצמם יכולים להפעיל בקלות.
פטנטים ועיצובים אחרים
תיבת הילוכים משנית בעלת 6 צירים. השינוי לשני חיבורי רצועות הביא להגדלת יחס ההעברה ופתר את בעיית התנועה המהירה והלא מדויקת של 6 צירים. דיסק הפלט של הציר השישי מתוכנן ללא גלגלי שיניים, עם מנגנון תמסורת מדויק, מה שמשפר את דיוק התנועה של הציר השישי... כרגע יש לנו יותר מ-30 פטנטים קשורים לרובוט הריתוך.
וִידֵאוֹ
פרמטרים
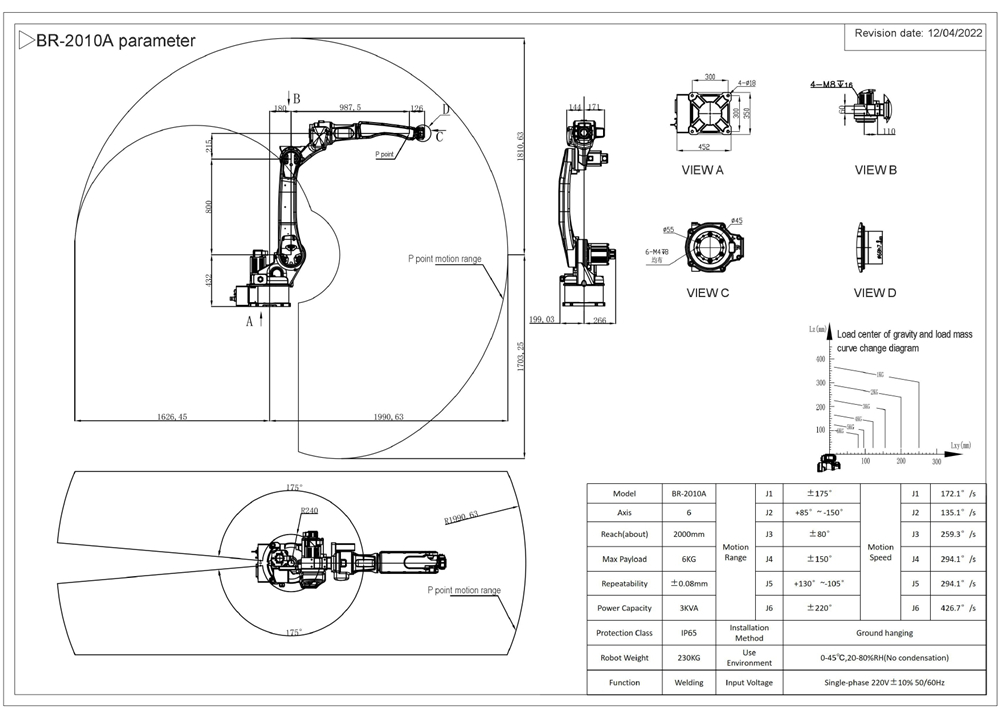
| דֶגֶם | BR-2010A | טווח תנועה | J1 | ±175° | מהירות תנועה | J1 | 172.1°/שנייה |
| צִיר | 6 | J2 | 85°+~ 150°- | J2 | 135.1°/שנייה | ||
| להגיע (בערך) | 2000 מ"מ | J3 | ±80° | J3 | 259.3°/שנייה | ||
| עומס מקסימלי | 6 ק"ג | J4 | ±150° | J4 | 294.1°/שנייה | ||
| הֲדִירוּת | ±0.08 מ"מ | J5 | 130°+~105°- | J5 | 294.1°/שנייה | ||
| קיבולת הספק | 3KVA | J6 | ±220° | J6 | 426.7°/שנייה | ||
| מחלקת הגנה | IP65 | שיטת התקנה | תלייה על הקרקע | ||||
| משקל רובוט | 230 ק"ג | שימוש בסביבה | 0-45℃, 20-80% לחות יחסית (ללא עיבוי) | ||||
| פוּנקצִיָה | הַלחָמָה | מתח כניסה | חד פאזי 220V±10% 50/60Hz | ||||





